Advanced robots we speak of are countless and come with their own set of expertise. None though are versatile enough to even reach the dexterity of any living species on the face of the planet. The constant pursuit to make them lifelike in a versatile set of conditions is still on and the Massachusetts-based Boston Dynamics is the place to look up.
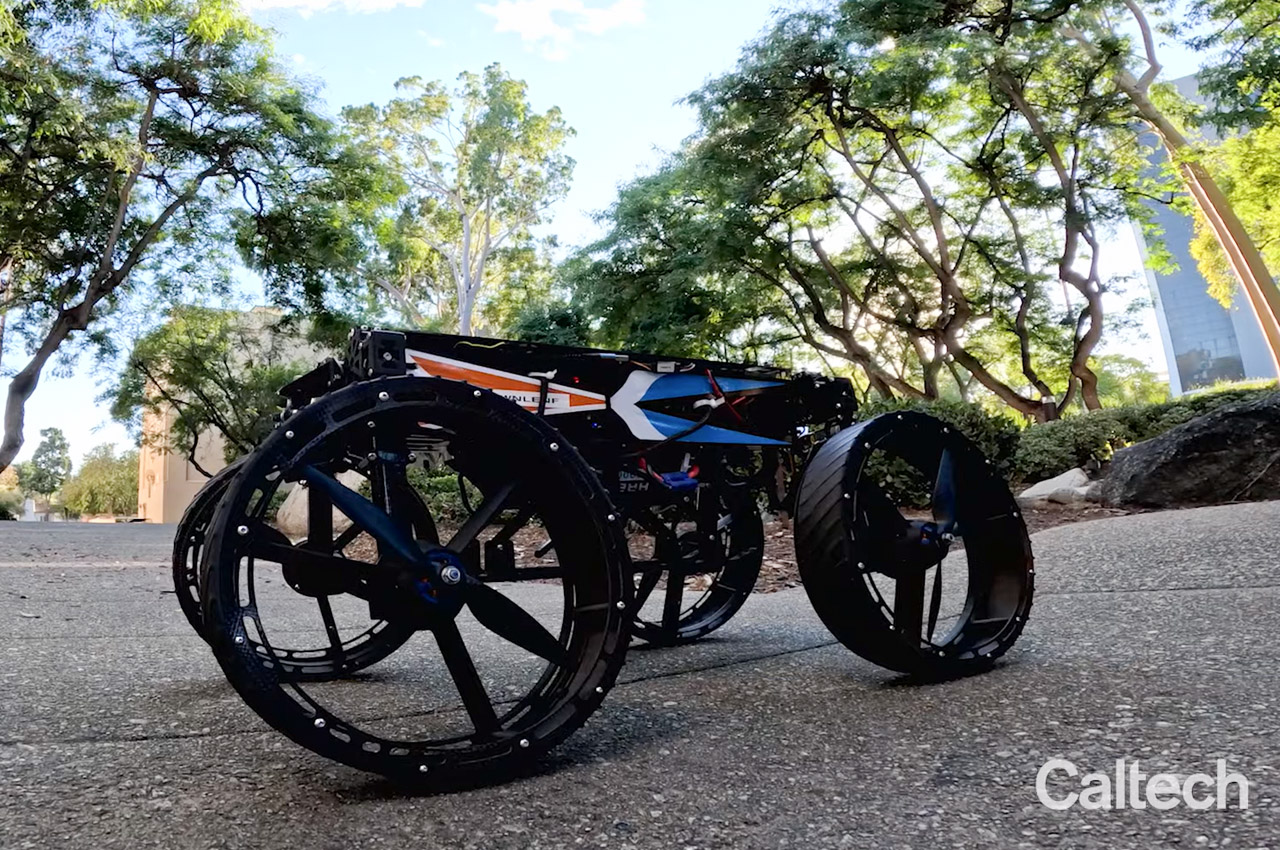
California-based Caltech has its eyes set on a dextrous robotic machine capable of adapting to unpredictable landscape and weather conditions. Though not as advanced as the Spot dog robot, the Multi-Modal Mobility Morphobot (M4) can go from an agile car on the road to a standing bot when bigger obstacles arrive, and then into a flying quadcopter when land is simply unscalable. Quite smart I must say!
Designer: Caltech

M4 robot is the brainchild of Mory Gharib, a professor of aeronautics and bioinspired engineering at Caltech, in association with Alireza Ramezani, who’s an assistant professor of electrical and computer engineering at Northeastern University. The inspiration for the Nvidia Jetson Nano CPU (affordable miniature computer) powered bot comes from animals like meerkats and walrus.

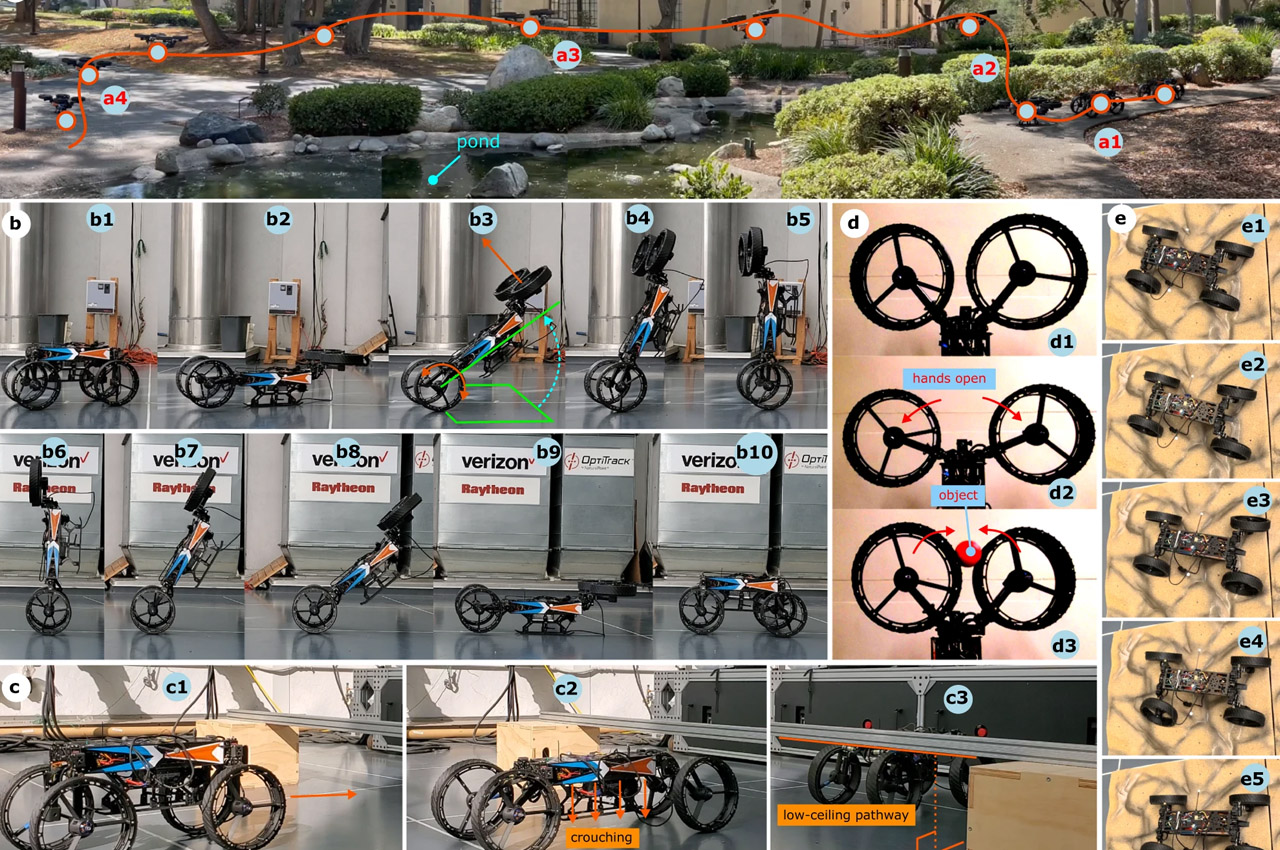
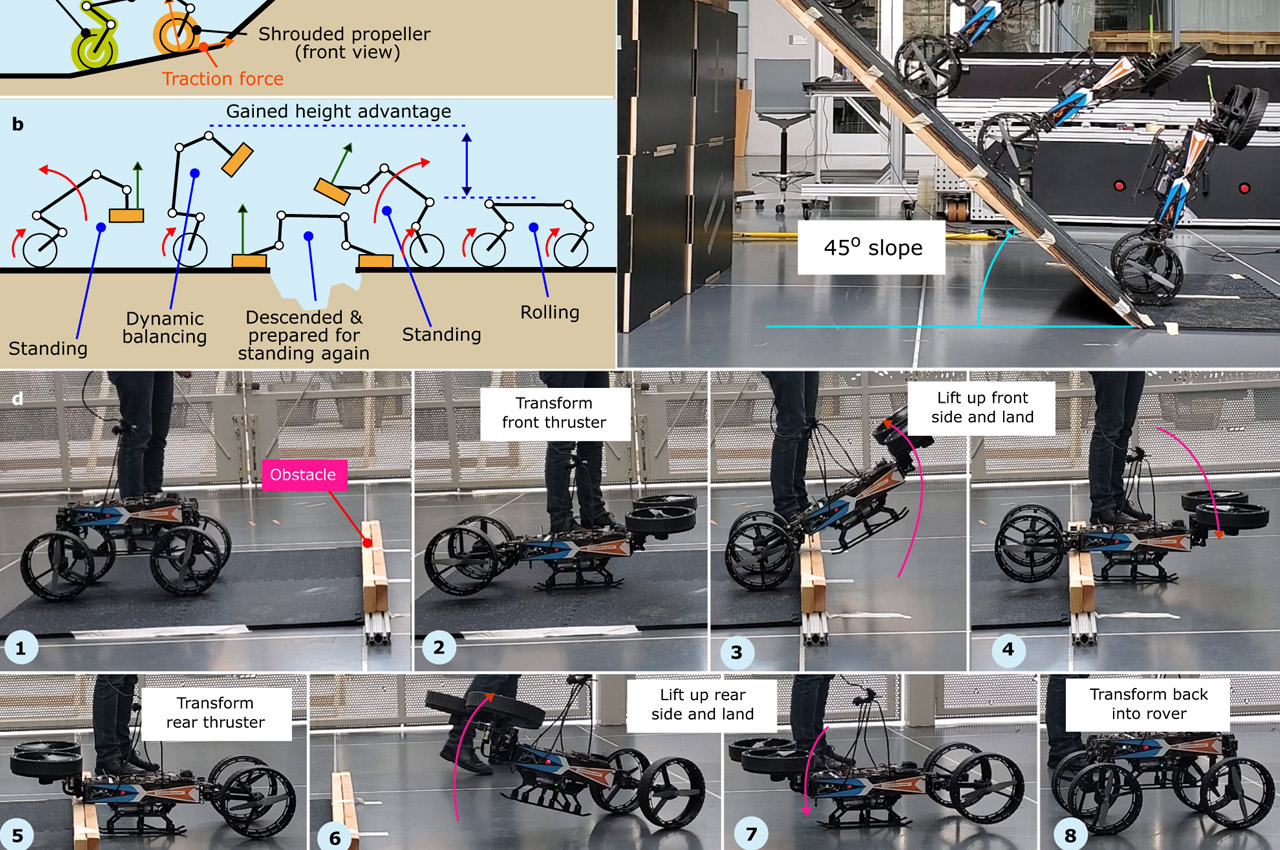
When moving forward in four-wheeled mode the rectangle-shaped robot can crouch by lowering its stance or lock rotation of the wheels to move them in pairs. In another configuration, it can climb steep slopes with ease or stand upright balanced by propellers to scout the way ahead. To turn into a flying machine, all the wheels turn sideways and align horizontally to the plane for lift-off.

According to Caltech, the bio-inspired robot employs artificial intelligence to scout the environment for its autonomous movement without any human involvement. That level of dexterity could be very useful for exploring the dusted surface of Mars or used in rescue missions. Of all the modes, the four-wheeled mode is the most energy efficient, and detailed specifications of the robot-like maximum flight time or two-wheeled locomotion time are not known right now.
Complete details of the ongoing research on M4 are available on Nature Communications and as per Alireza Ramezani who’s the corresponding author of the study, the aim of this project is to “push the boundaries of robot locomotion by designing a system that showcases extraordinary mobility capabilities with a wide range of distinct locomotion modes.”