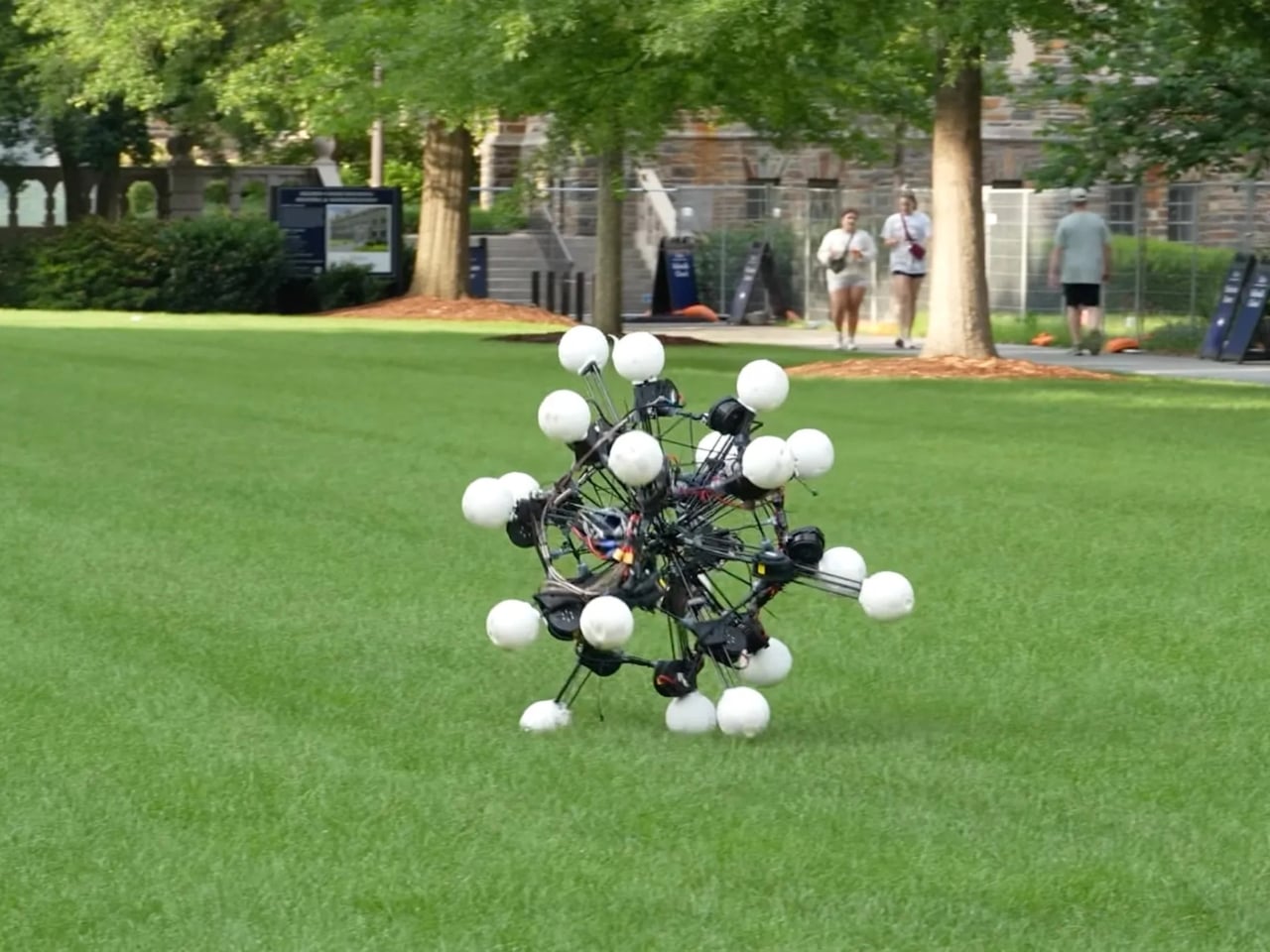
The moment you see Argus rolling across a college lawn, you feel a kind of awe that’s equal parts scientific admiration and mild existential discomfort. It doesn’t look like a robot. It doesn’t look like anything you’ve seen before, actually. It looks like a sea urchin crossed with a fever dream, or if you’ve spent any time on the internet in the last few years, it looks exactly like what happens when someone renders a biblically accurate angel and sends it out to navigate uneven terrain.
That’s not an exaggeration. The internet made the comparison almost immediately after Duke University’s General Robotics Lab unveiled Argus, and the parallel holds up. In the Book of Ezekiel, the ophanim, a type of divine being, are described as wheels covered in eyes, seeing in all directions simultaneously. Argus, named after the Greek mythological giant with a hundred eyes, does essentially the same thing, minus the divine mandate. It has 20 legs, each one telescoping and tipped with a camera, arranged at the vertices of a regular dodecahedron. No blind spots. No preferred orientation. No front or back.
Designer: Duke University General Robotics Lab
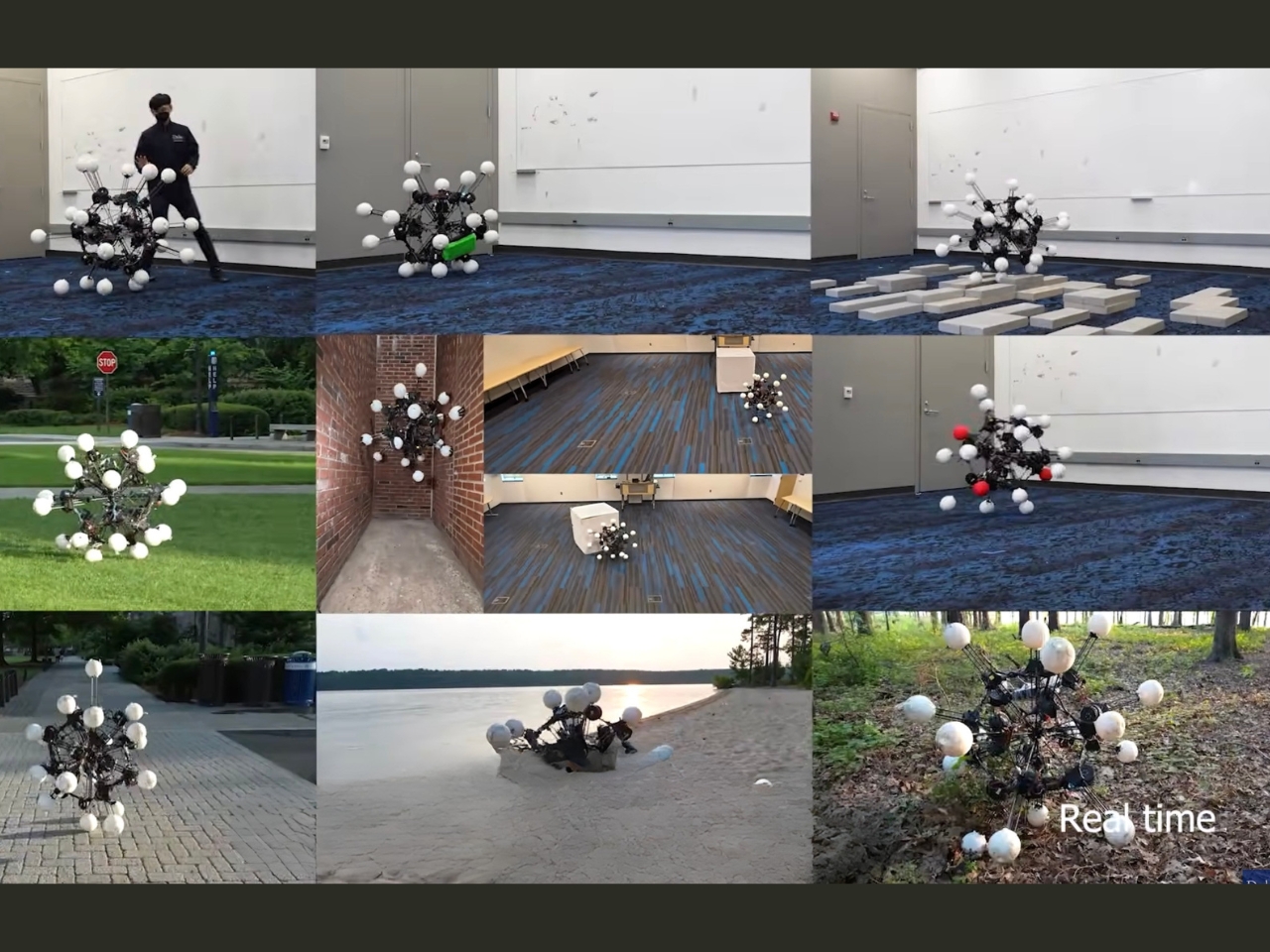
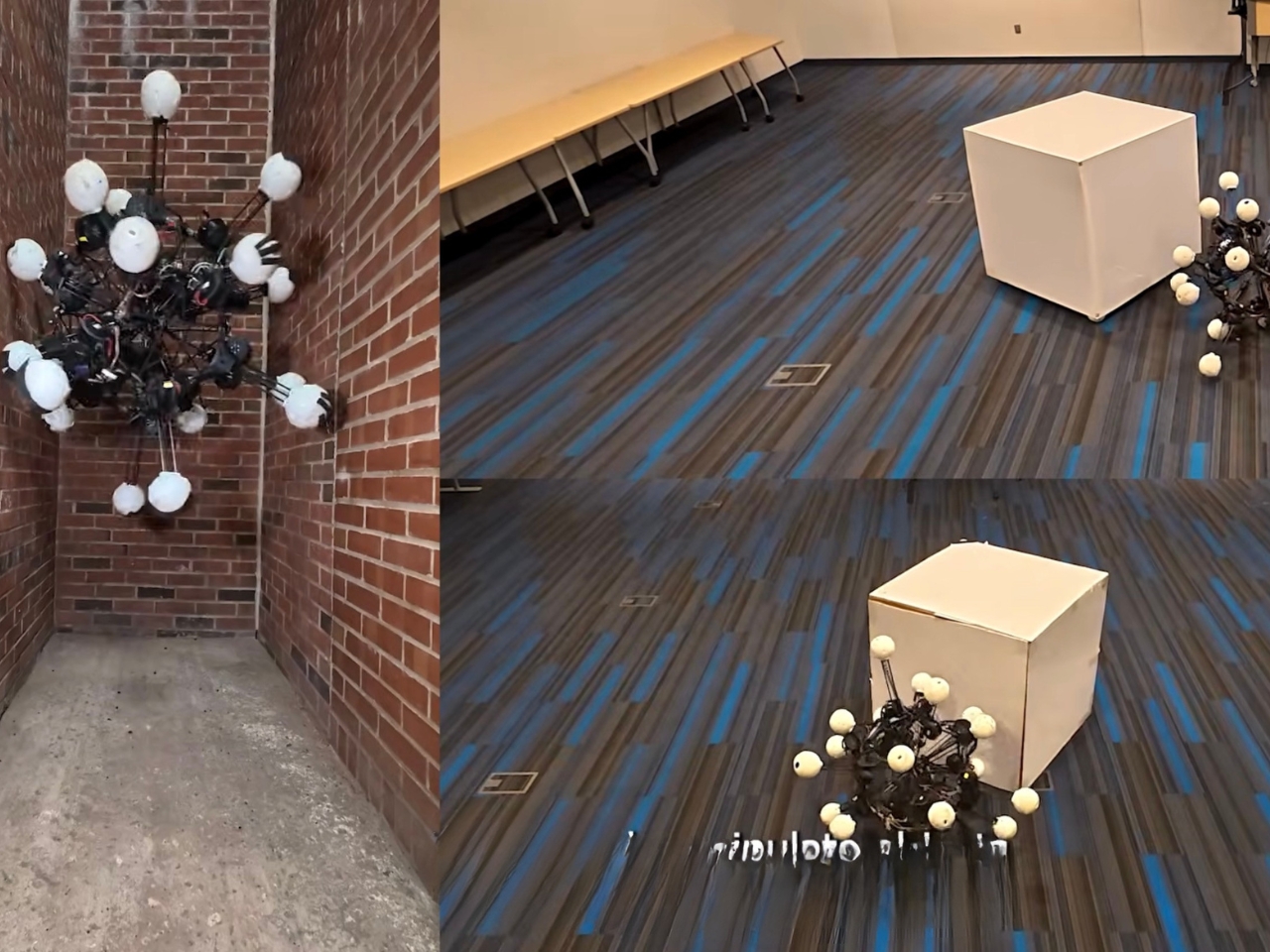
That last part is what keeps pulling me in, design-wise. We’ve spent decades building robots that mirror the logic of our own bodies: two legs, bilateral symmetry, a definitive forward direction. It made intuitive sense. We move front-to-back, so we assumed machines should too. Argus rejects that assumption entirely. The team at Duke built it around a principle they’re calling dynamic symmetry, which refers to how uniformly a robot can accelerate in any direction. Most robots are strongest and most efficient when moving the way they were designed to move. Argus has no such preference. It moves sideways, backward, forward, and diagonally with the same ease, which sounds like a minor technical distinction until you watch it roll through rough terrain, navigate around trees, and absorb collisions without losing its course. That’s when you realize how significant the gap is.

The design precedent here matters more than it might seem. Robotics has long borrowed from nature by mimicking the shapes that evolution produced: bipedal forms for humanoids, quadruped frames for terrain bots, insect geometries for swarm machines. But Argus is borrowing something different from nature. It’s borrowing from the radial logic of starfish and sea urchins, creatures that don’t have a front because every direction is equally valid. The Duke researchers describe Argus as an “existence proof,” a demonstration that a robot built for dynamic symmetry isn’t just theoretically interesting but practically deployable. Postdoctoral researcher Boxi Xia put it directly: “It produces a robot you can deploy in the wild, on uneven ground and in clutter, even in low-gravity settings.”

Low-gravity settings. That detail is doing a lot of quiet work in this conversation. The practical applications being discussed range from disaster response and search-and-rescue operations to planetary exploration, environments where the rules of conventional locomotion break down fast and all-directional agility becomes the difference between success and failure. A humanoid robot in a collapsed building still has to worry about which way it’s facing. Argus doesn’t.

I’ll admit the design is deeply strange to look at. It is not sleek. It is not elegant in any conventional sense. It doesn’t have the clean industrial confidence of Boston Dynamics’ machines or the deliberate anthropomorphism of recent humanoid models. It looks a little chaotic, frankly, like it was assembled by someone working from a very different set of aesthetic values, someone less interested in how the thing looks than in what the thing can do. And maybe that’s the point. Beauty in engineering doesn’t always wear the shape we expect. Sometimes it rolls across a lawn on 20 legs, sees absolutely everything, and changes the conversation entirely.

Argus is the kind of design that reminds you why robotics is still worth watching. Not because of what it looks like, but because of what it means for how we think about movement, perception, and the assumptions we’ve been quietly building into machines all along.