James Bruton’s latest creation stands out even among his many engineering oddities and builds on the kind of inventive spirit that we saw in his earlier two-ball omnidirectional bike. The British engineer turned full-time YouTuber has now built an electric bike that balances on a single giant ball and can move in any direction based on how the rider leans and how its control systems respond.
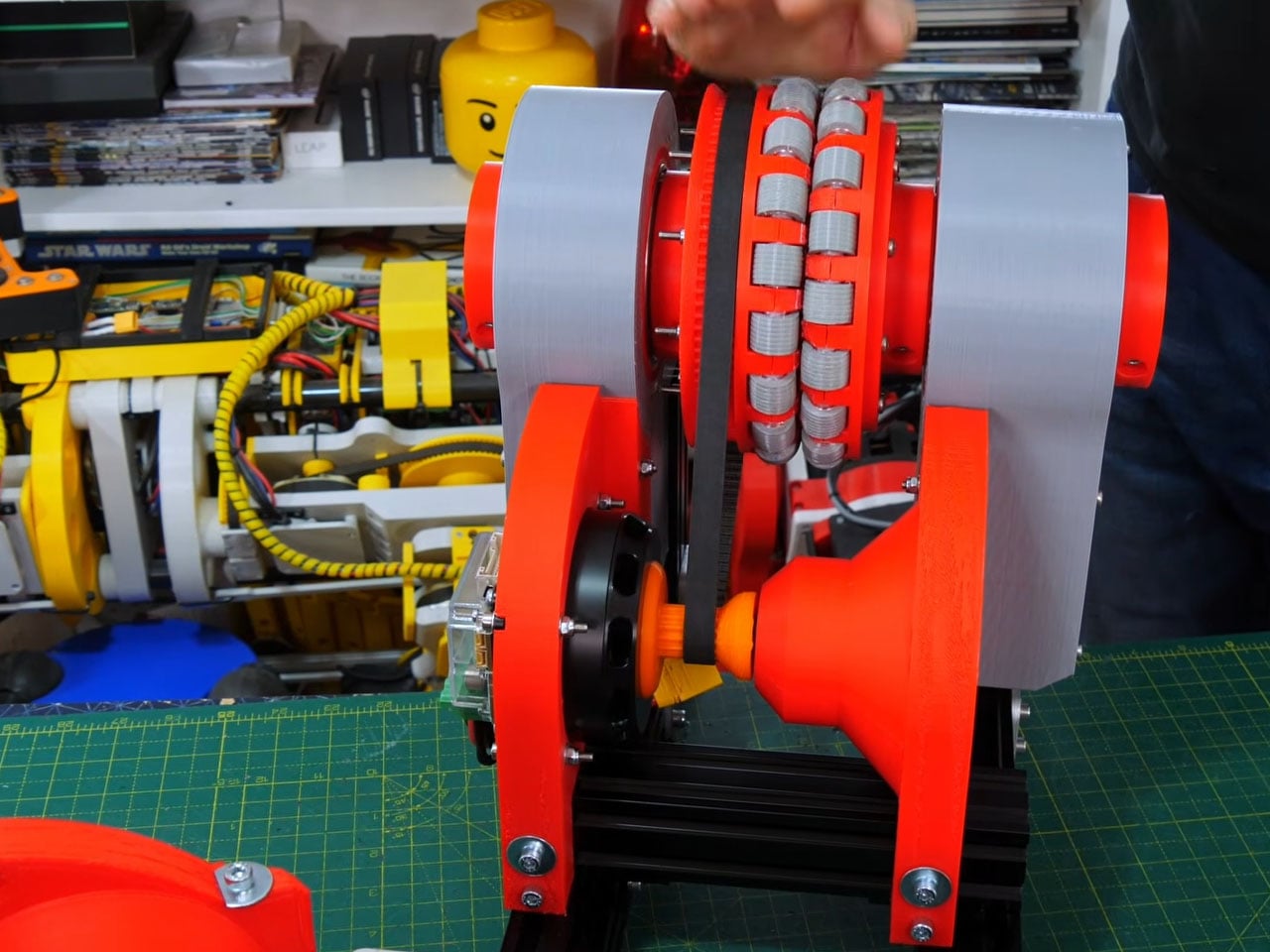
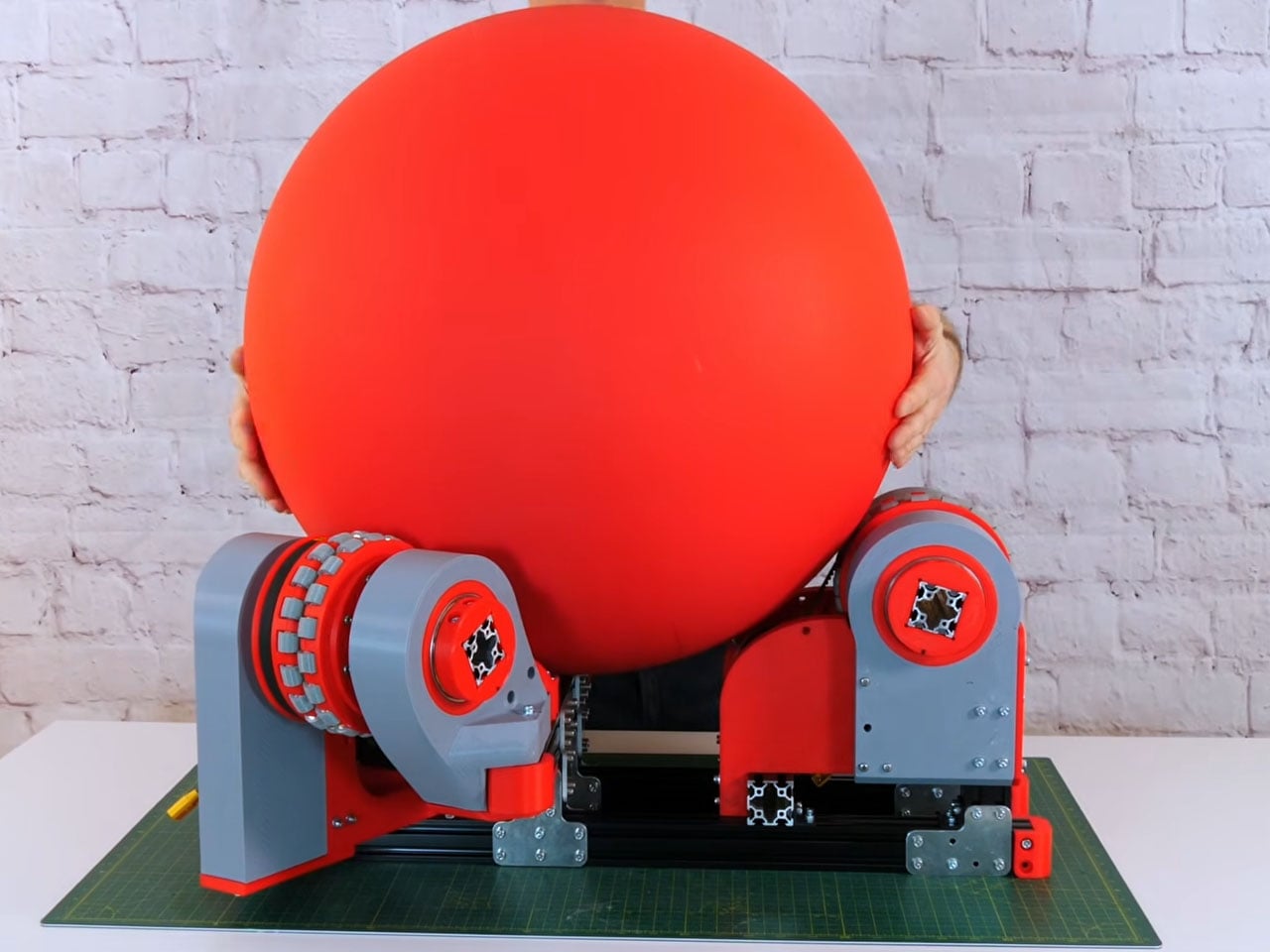
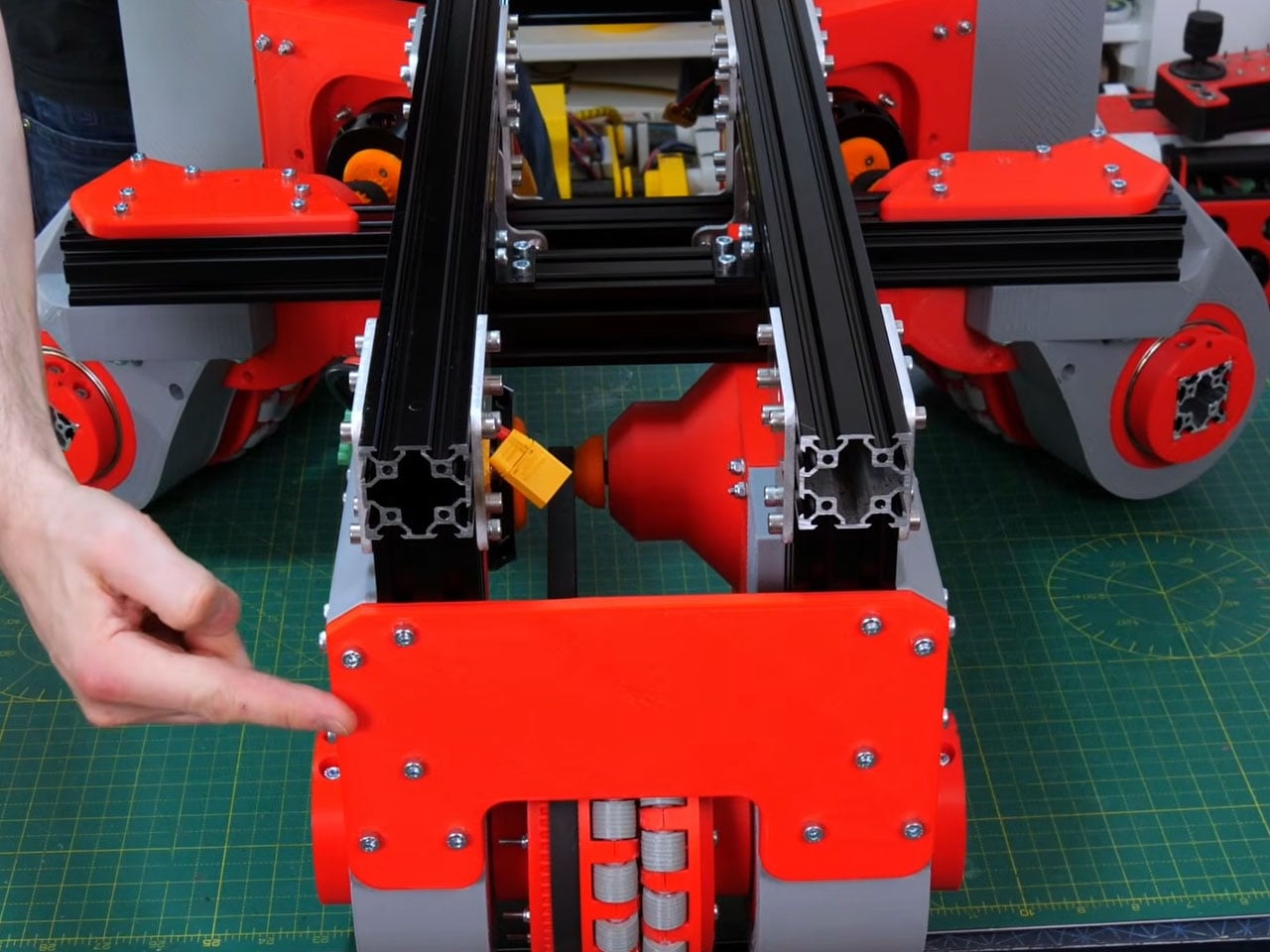
The One-Ball Bike has a roughly 2-foot red spherical ball that supports the entire machine and the rider above it. Around this sphere sit three omnidirectional wheels, arranged in an equilateral triangle under the bike’s frame, each driven by a motor capable of pushing the ball forward, backward, or sideways. These omni-wheels have two rows of smaller passive rollers mounted around their circumference, giving the ball smooth omnidirectional movement while distributing the load across many contact points.
Designer: James Burton


Balancing on a single contact point with the ground is a technical challenge that goes far beyond traditional bicycles or even Segway-style scooters, which correct in one axis. The One-Ball Bike must remain stable front-to-back and side-to-side simultaneously, and this is managed by a central control system built around a microcontroller like the Teensy 4.1 and an inertial measurement unit (IMU). The IMU tracks the bike’s orientation in real time, while a PID (proportional-integral-derivative) controller constantly adjusts the speed and direction of the motors to keep the frame upright.

Power comes from multiple lithium polymer battery packs configured to supply around 50 volts to the drive motors. The bike’s structure combines aluminum extrusion for strength with a range of custom-fabricated parts, many of which Bruton 3D-printed himself. This hybrid approach keeps the overall weight manageable while allowing rapid iteration during the build process.
Ride control looks very different from conventional bikes. There are twist grips mounted where handlebars would normally be, letting the rider influence forward and lateral motion by adjusting how they lean and where they apply torque. Steering, in particular, remains a work in progress because the single ball doesn’t behave like a wheel that naturally points in one direction. Bruton has experimented with air-resistance control surfaces and even a makeshift foam wing to bias the bike’s direction when simple wheel control isn’t enough.
Another quirky challenge has been static electricity. The friction between the plastic ball and the surface generates a charge that can disrupt electronics, occasionally causing unexpected shutdowns during testing. Bruton has been investigating shielding and grounding solutions to address this. Bruton’s open-source ethos means all code, CAD designs, and build documentation have been published online, giving other makers a foundation to experiment with and improve upon his design.